


Premjenjivi sistem za pregled tereta i vozila
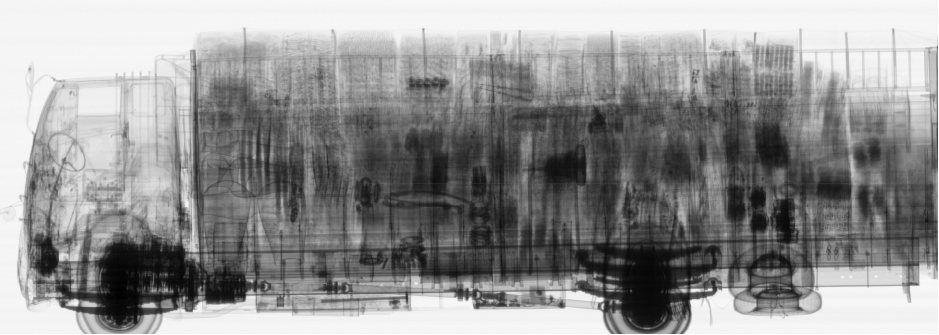
BGV6100 pokretni sistem za pregled tereta i vozila opremljen je elektronskim linearnim akceleratorom (Linac) i novim PCRT čvrstim detektorom, koji koristi dvoenergetske rendgenske zrake i napredne algoritme za identifikaciju materijala za postizanje perspektivnog skeniranja i snimanja tereta i vozila, identifikaciju krijumčarene robe.Sistem ima dva načina rada: režim vožnje i režim mobilnog skeniranja.U režimu mobilnog skeniranja, sistem se kreće po tračnici kako bi skenirao teretna vozila.Postavljanje sistema uzima u obzir pogodnost korištenja na licu mjesta.Na ulazu u vozilo postavljena je radna konzola.Osoblje vodiča na prednjem dijelu je odgovorno za početak procesa inspekcije nakon što je vozilo spremno i može pratiti cijeli proces inspekcije tokom cijelog procesa.Kada se otkrije abnormalnost, proces inspekcije se može odmah zaustaviti.Nakon što završi interpretaciju slike slike vozila, interpretator slike stražnjeg vozila može komunicirati s prednjim vodičem kroz konzolu i može dati rezultat interpretacije putem odgovarajućeg signala upozorenja.
- Veća propusnost, ne manje od 120 teretnih vozila na sat u režimu vožnje i ne manje od 25 teretnih vozila na sat u načinu mobilnog skeniranja
- Sigurnost od zračenja za vozača, ima funkciju automatskog isključivanja kabine kamiona i jedan ključ prekidača za mobilno skeniranje
- IDE tehnologija, podrška materijalnoj diskriminaciji
- Bogat interfejs za integraciju sistema
- Veća sposobnost prodiranja čelika
- Napredni sistem za upravljanje informacijama o slici.Skladištenje, preuzimanje, pregled, izvoz i druge funkcije informacija o vozilu, uključujući slike perspektive, podržavaju umrežene centralizirane funkcije upravljanja.
- Operativni interfejs klijenta: Dizajn klijentskog operativnog interfejsa softverskog sistema opreme je razuman i jednostavan za korišćenje, interfejs je jasan i koncizan, rad je zgodan, konfiguracija funkcionalnog modula je intuitivna, raspored je razuman, a održavanje je lako.





